はじめに
OYA-G 2023モデルの設計計算書を基に、足回りの設計手順を紹介します。
仕様策定からギヤ比の選定までの流れについて解説します。
ギヤードモータは以前紹介したタミヤ 遊星ギヤーボックスセットを使用します。
ロボカップジュニア サッカーライトウエイトのモータにいて - 隠居エンジニアのものづくり (hatenablog.com)
仕様策定
得点を競う競技ですので、先ず戦術を決める必要があります。
車両型ロボットの特性を理解し、ルールの理解(熟読)、好成績チームの戦術研究などを基に自分たちのチームの戦術を決定し、戦術を実行する為に最適なロボットを設計します。
車両型ロボットの特性
車両型ロボットの特性については合宿やオープン大会など、機会がある度にプレゼンしています。
その中で繰り返し伝えているのは ”オムニ型 > 4輪駆動型 ?” です。
もう少し修飾すると ”上級者のオムニ型 > 初心者の4輪駆動型” が現状の正確な状況把握ですし、これについては異論はありません。
初心者を卒業すると皆さんオムニ型に移行するので”上級者のオムニ型”と”上級者の4輪駆動型”の対戦は前例がないと思います。
オムニ型・四輪駆動型の比較
・推進力の伝達効率(4輪オムニ型)
フリーローラーの伝達効率は0.5(ウォームギヤなど”すべり”を前提にした機構の効率は約0.4~0.5)と仮定します。
| オムニホイール | ゴムタイヤ | |
| 進行方向推進力 | 0.7 | 1 |
| フリーローラー摩擦損失 | 0.5 | - |
| 総合効率 | 0.4 | 1 |
相手と押し合う状況では進行方向は前になります。
この時、オムニホイールは進行方向に対して45度の傾きを持っていますので進行方向への推進力は約0.7倍になります。
更にフリーローラーの摩擦損失を経て地面に推進力を伝えます。
この為、総合効率ではゴムタイヤの半分以下になります。
オムニ型は真横に動けるなど自由な機動力と引き換えに推進力の効率が犠牲になっていると言えます。
・グリップ性能
加速時の路面(カーペット)への食い付き、制動距離はタイヤの性能に依存します。
グリップ性能に関して、学校で習った物理とは矛盾する”タイヤの太さとの関係”について解説をしておきます。
” 摩擦力 = 摩擦係数×垂直抗力 ” この式にはタイヤが地面に触れている面積(接地面積)が含まれないので、タイヤがカミソリの様に細くても、F1などのレーシングカーの様に太くてもタイヤの材料が同じなら摩擦力は変わらない事になります。
つまり、この式は摩擦係数がタイヤの単位面積当たりの荷重に依存しない前提になっていますが、実際には荷重依存性があります。
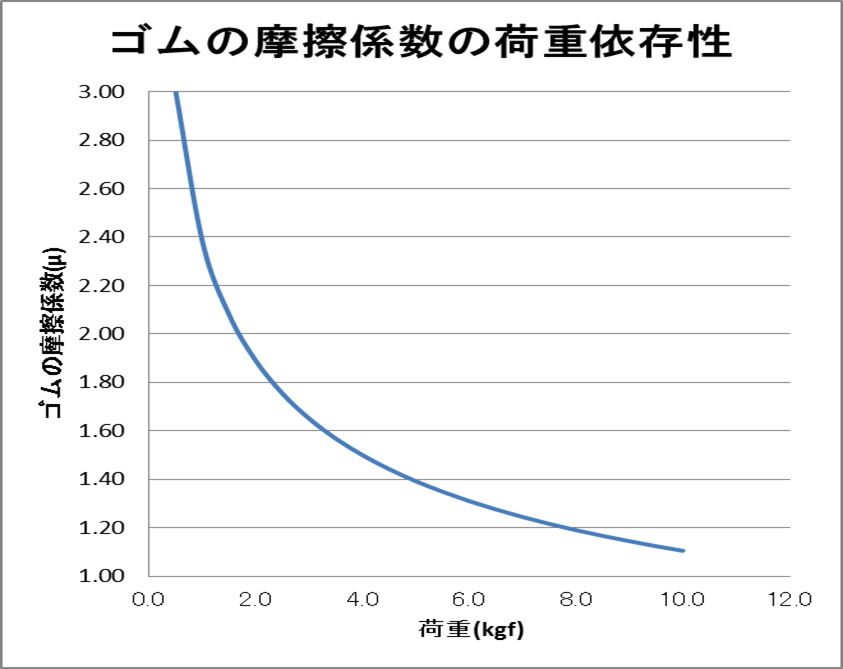
上図の通り、接地面積を広げて材料への単位面積当たりの荷重を低減すると摩擦係数が向上します。

この接地面積においてもゴムタイヤはオムニホイールに対してアドバンテージがあります。
つまり、4輪駆動型は押し合いでオムニ型を圧倒できるポテンシャルを秘めています。
ルール
必ずキックオフを経て試合が展開します。
不利?な守備側でもボールまでの距離は30cmです。
常に試合の主導権を得るには、キックオフで確実にボールを捉える必要があります。
次に捉えたボールを相手に取られなければ主導権を握り続けることができます。
この状態がブレークするのは”進行の停止”と判断された時だけです。
現在主流の戦術研究
講習会の資料にするために、試合中のロボットの動きを録画させて頂いた事があります。(このチームは、この後世界大会推薦され世界チャンピオンになりました)
進行の停止から中立点に置きなおされたボールを如何に早く補足するかが戦術の骨子でしたが、現在でも変わりないと思います。
動画から中立点にボールが置きなおされた瞬間のボールとロボットの距離を測定してデータにしたのが以下のグラフです。
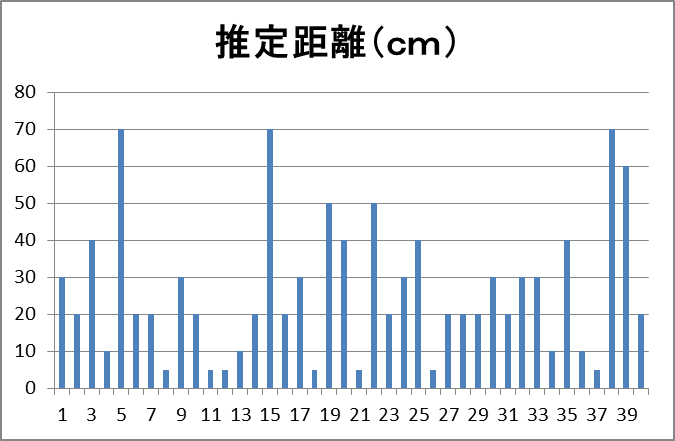
1試合に40回進行の停止による中立点へのボールの置きなおしが発生していることが分かります。
”中立点に置きなおされたボールを素早く補足したロボットが試合を制する”と言う戦術の裏付けでもあります。
これを頻度にしたのが以下のグラフです。
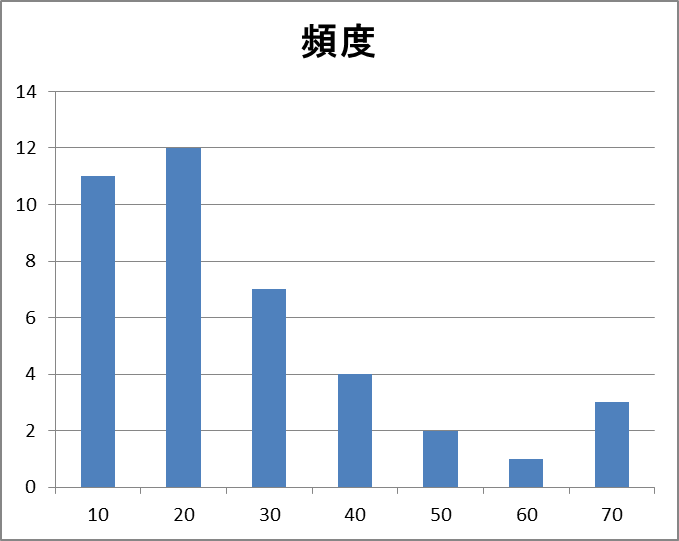
中立点へのボールの置きなおしが発生した時のロボットの移動距離30cm以内が75%を占めている事がわかります。
つまり加速性能重視の設計が有利と言えます。
戦術
リアルサッカーに習って、守備側でも確実にキックオフを制して、相手ロボットを2台纏めて押し返すフィジカルの強さと、可憐なボディフェイントからのミドルシュートでゴールすることを目指します。
これは、審判に楽をして頂ける戦術でもあります(プッシングにならない距離からのシュートなので、キックオフのコールからゴールのコールまで審判の介入はないはずです)。
ロボットの要求仕様は
〇30cm先に最短時間で到達する足回り(4輪駆動型)
〇キックオフで確実にボールを捉える制御
〇捉えたボールを相手に取られない保持力特化型ドリブラー
〇膠着状態(押し合いでの進行の停止)にならない圧倒的グリップ性能(4輪駆動型)
〇ドリブラーでのシュート
ロボカップジュニアに出会った2007年から私が最適解と考えている戦術ですが、ルール改定でキーパーの自ゴール内へのアウトオブバウンズが加わった事で、更に戦術の優位性が上がったと思います。
因みに、知っている限り、この戦術を採用したチームはありません。
(4輪駆動型を採用するも途中で断念してジャパンオープン選抜大会にはオムニ型に戻したチームはありました。これは採用チームとして数えていません。)
機会がある度に解説している割には、この戦術にチャレンジするチームが現れないので ”この戦術に興味がない理由” を聞いたのですが ”勝っているチームの戦術と違うから” との事、アイデアコンテストとしてはちょっと残念な理由です。
足回りの設計
駆動方式
4輪駆動型を選択します。
更なる接地荷重の低減を目指して、6輪駆動にて設計します。
可憐なボディフェイントの成功率を上げる為に前輪のみオムニホイールを採用(旋回性向上の為)します。
このオムニホイールも接地荷重の低減を目指して、トリプルにて設計します。
トップスピード・加速性能の設定
停止状態から30cm先のボールまで瞬時に移動する事に特化します。
その後の移動は自ロボットのペースで良いので、加速性能”極ぶり”でトップスピードは求めません。
キックオフと同時に横に蹴り出すにしてもドリブラで補足してドリブルで逃げるにしても、相手ロボットは多少は前進する必要があります。
キックオフ0.3秒後に20cm以上前進できれば確実にボール補足できると仮定すると
トップスピード0.5m/s(遅い部類に入ると思います)、トップスピードまでの加速時間0.1sにてロボットの必要トルクを計算します。
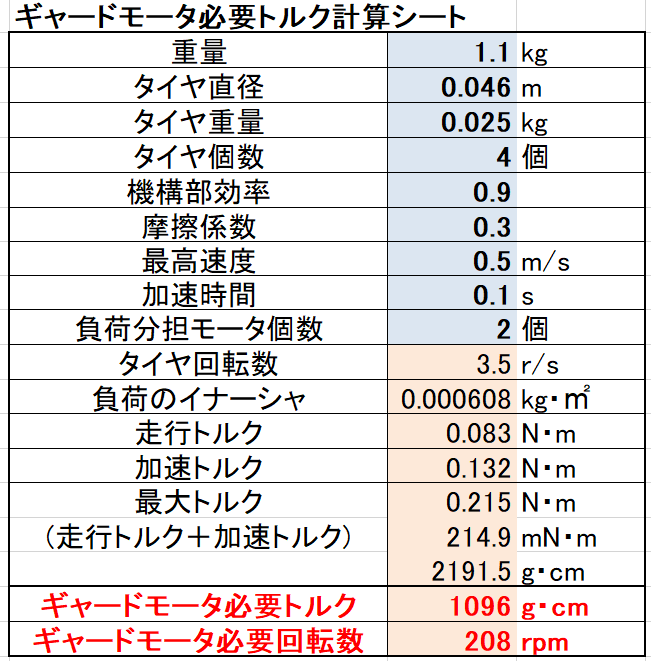
ギャードモータ選定
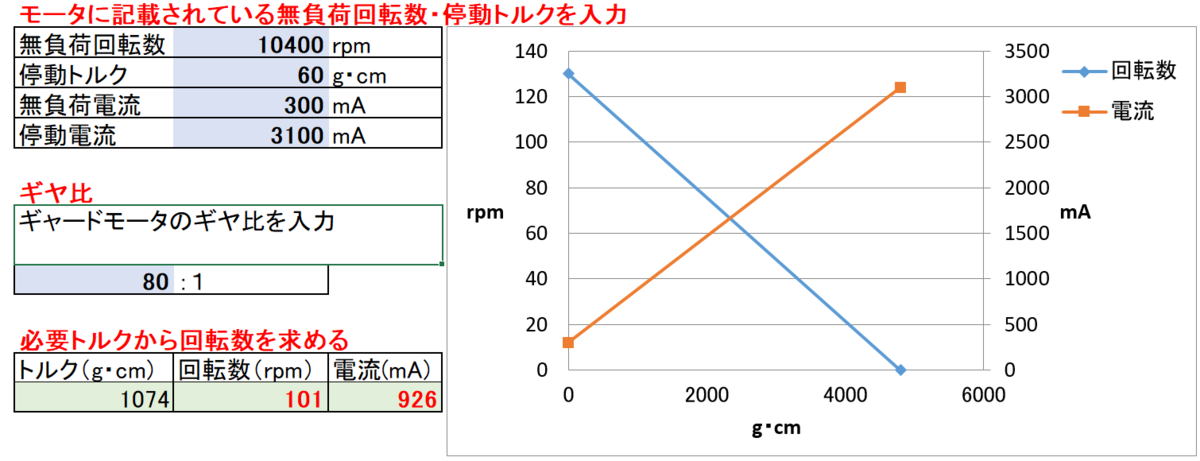
必要トルクを満たす仕様のギヤードモータを選定するのですが、今回はタミヤ 遊星ギヤーボックスセットを用いるのを前提としていますので、4:1、5:1、16:1、20:1、25:1、80:1、100:1、400:1の中からギヤ比の選択を行います。
モータ仕様の推定(タミヤ製品など4パラメータがない場合)
モータの仕様は無負荷回転数、停動トルク、無負荷電流、停動電流で表されるのですが、タミヤ 遊星ギヤーボックスセット添付の説明書ではRC-260 適正電圧 3V、適正負荷 15gf・cm、適正負荷回転数 10500rpm、消費電流 1A と記載されています(ミニ四駆用チューンモータなどタミヤ製モータに多い表記です)。
適正負荷で使って欲しいと言うメッセージだと思います。
しかしながら設計計算には前出の4パラメータが必須ですので設計計算書を用いてモータの仕様を推定します。
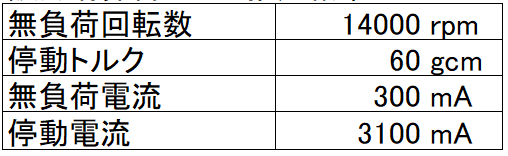
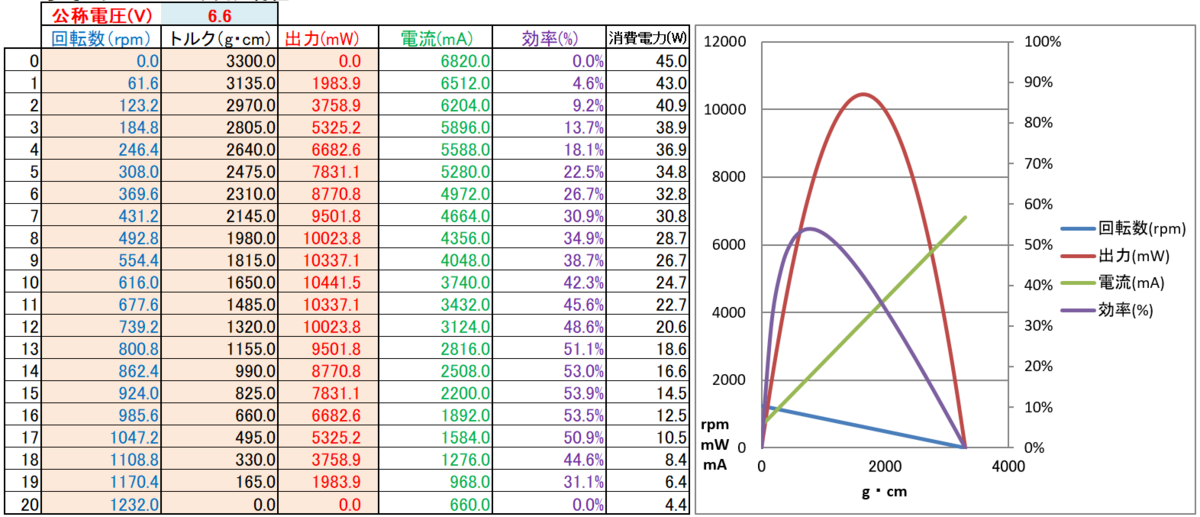
この計算結果(適正電圧3V)にロボットに使用するバッテリーの電圧6.6V(電圧が低いと不人気のLi-Fe 2セル)を比例計算すると
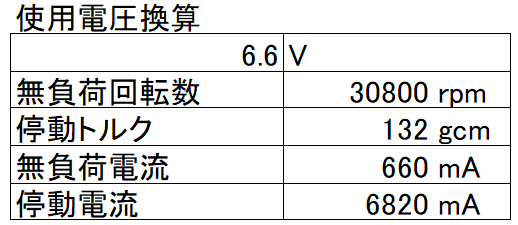
となります。
この値にてギヤ比の検討を行います。
DCモータの適正電圧を超える電圧で使用する時の留意点
モータの焼損原因は主に巻き線の温度上昇による絶縁破壊(ポリエステルやエナメルなどの被覆が焼損して巻き線が絶縁を失う)です。
温度上昇は"巻き線抵抗×電流の2乗"にて発生する熱によるのでモータの負荷が軽くなるように設計する必要があります。
具体的には適正電圧時の停動電流3100mAを絶対に超えない様に設計する事が大前提です。
下図の効率曲線(紫色の線)の頂点53%付近(最大効率)を狙って設計できればベストです。
試合中に起こる最大負荷の想定
イメージし易い様に、最大負荷状態をロボットの重量換算で考えます。
相手ロボットと押し合うので、相手ロボット2台を纏めて押す場合を考えます。
2台担いで移動するイメージで自重の3倍、相手ロボットもこちらのロボットを押す推進力があるので更に1台分の負荷があると仮定します。
4倍の負荷としてギャードモータ必要トルク計算シートの”重量”に4.4kgを入力してギヤ比と電流の関係をグラフにします。
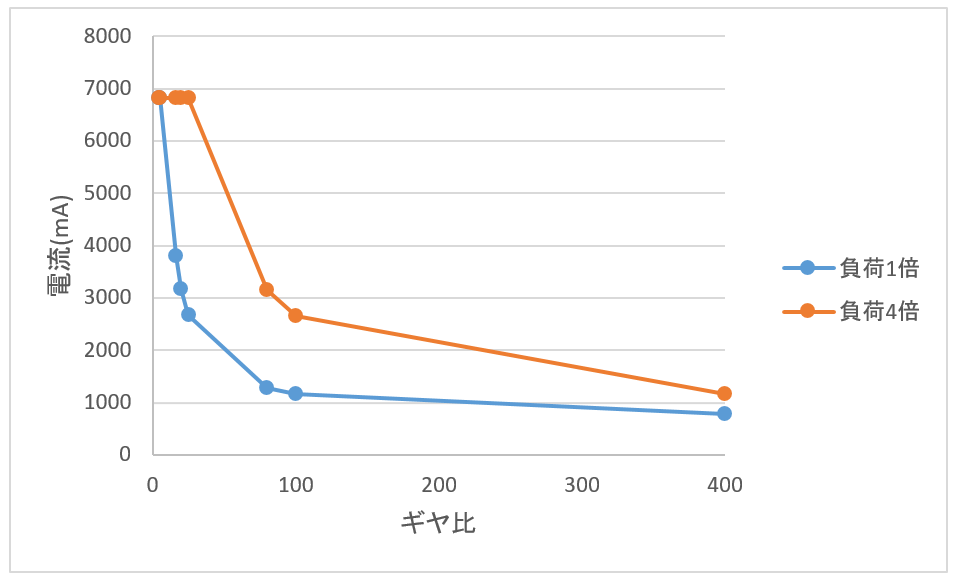
ギヤ比4:1、5:1、16:1、20:1、25:1は負荷4倍の時に3100mAを超えてNGとなります。
次にトップスピード0.5m/sに必要な回転数208rpm以上の条件に400:1がNGとなり、80:1と100:1が候補となります。
私のタミヤ 遊星ギヤーボックスセットが80:1で組立済みですので今回は時短優先で80:1とします。