ロボカップジュニアサッカーのLED表示について
RoboCupJunior Soccer Rules 2019からロボットが可視光を発する事ができなくなりました。
”Robots must not produce visible light that may prevent the opposing team from playing when placed on a flat surface.
Any part of a robot that produces light that may interfere with the opposing robot’s vision system must be covered.”
”ロボットは平らな場所に置いた状態でほかのロボットの動作を妨害するような可視光を出してはいけません。
また、相手のロボットのビジョンシステム(光学系センサ類)に干渉する可視光を生み出すどんなロボットの部品も隠さないといけません。”
実運用は”ロボカップアジアパシフィック2021あいち”が最初
本格運用は”ロボカップアジアパシフィック2021あいち”から?
見出し修正:確認不足で申し訳ありませんでした。2019年大会にてルール適応されておりました。2019年大会の動画にてロボットのLED点灯が確認できるのは、対戦チームにLEDを光らせる許可を取れば競技中のLED点灯は可能だった為の様です。
情報提供ありがとうございました。
ルールは年内にUpされればジャパンオープンのルールとして採用し、Upが間に合わなかったら前年度のルールで競技を行う暗黙の手順がある様で、2019年大会が2018年ルールで行われるまでは前年度ルールでノード、ブロック、ジャパンオープンの競技が行われるのが恒例でした。
ところが2020年ルールが初の年内Upとなったので”ジャパンオープン2020和歌山”は2020ルールでの競技予定でした。
残念ながら、ジャパンオープン2020和歌山、ジャパンオープン2021名古屋と中止が続いたのでオンサイト競技が行われる予定の ”ロボカップアジアパシフィック2021あいち” が ”可視光を出してはいけません” ルール適応の最初になります。
”可視光を出してはいけません” ルールの本格適応になる可能性があります。
参加予定の方はラインセンサの遮光や電圧計などのLED表示器などに御注意下さい。
NG判定方法
特別な測定器は不要です。
可視光なので判定は簡単で、目視で光っているとNGです。
対策の具体例
マイコンボード
不要な状態表示LEDは黒色テープで覆う!
マイコンボードはArduionNano互換ボードを使用しています。
4つLEDが付いてますが”RX”以外の3個を黒色テープで遮光します。
とても明るいので3重貼りにする必要がありました。
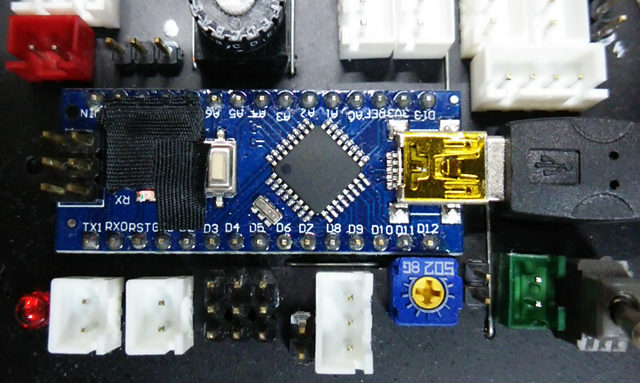
写真は電源投入時です。RXはダウンロード時に点滅しますが、ハードウエアシリアルを使用していなければ競技中に点灯することはありません。
ダウンロードの不具合が起こった時の原因切り分け用に表示を生かしてあります。
マイコンボードを組み付ける前に、遮光作業する事をお勧めします。
デバッグ用LED
デバッガーの無い開発環境でロボットのプログラムを仕上げるにはLEDによる状態表示は必要です。
”試合中は使えない”&”デバッグ中は必要”を両立する方法として、”着脱式”を選択しました。
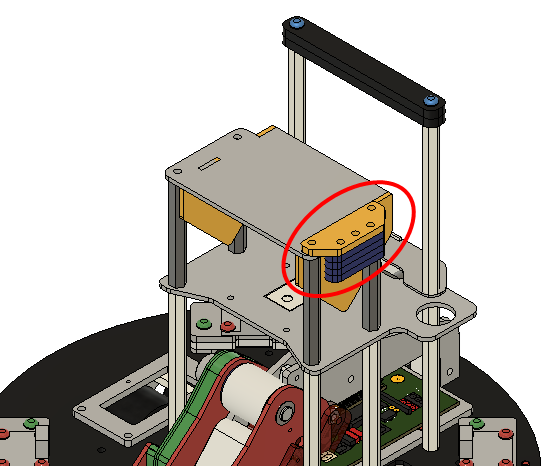
2019年モデル(ルール適用は2018)では3個のLEDで状態表示する為のユニットを搭載(赤丸の部分)していました。
青色の部品は遮光ユニットで220mmの高さにあるカメラからはLEDが見えない構造になっています。
お手本機として遮光方法の例として見せるのか、人からは見える様になっているので”LEDつけてるじゃん”と誤解を受けるリスクに配慮するのか、迷いましたが非搭載としました。
デバッグ時はマイコンボードの動作確認用に作った制限抵抗付LED配線を貼り付けます。

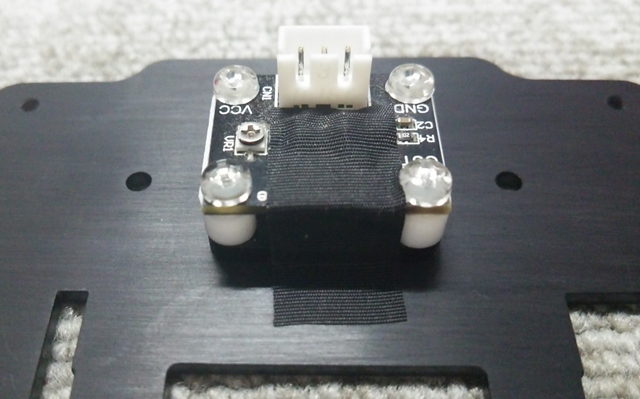
電圧計
7セグLED電圧計モジュールは取付板とコネクタ固定を兼ねた基板を製作して着脱式にしました。
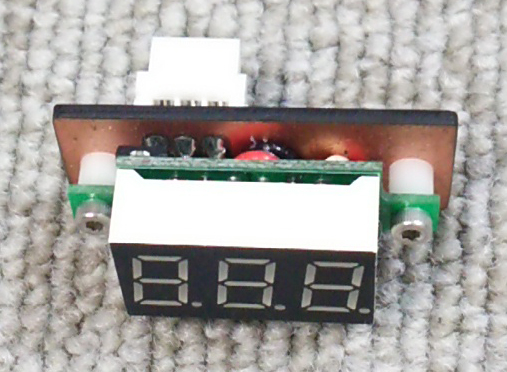
搭載時はこうなります。

中央下側に移りこんだLEDはPCA9685のパイロットランプですが、制限抵抗を470kΩに換装して暗くしてあります。この明るさなら黒テープの重ね張りの必要がありません。
もちろん競技時は遮光します。
ラインセンサ
適切な感度を得るための高さ調整と床面の不要部に光を当てない為の光路制限を兼ねた構造としました。

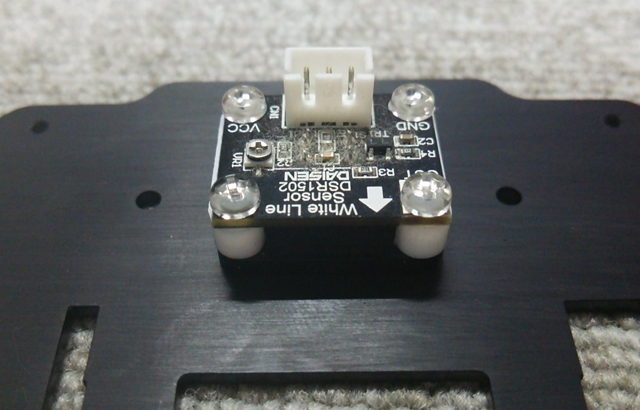
SEM3やFR4を用いたセンサはLEDの光がガラスや樹脂を伝わって裏面や側面に漏れますので黒色テープで対策します。

写真は底側から斜めに見ています。
LEDとフォトトランジスタが隠れている様子が分かると思います。
この角度より内側に光が制限されて、不要な光がカーペットを光らせて相手ロボットのカメラを妨害する事を防げます。
動画は暗所でロボットを”平らな場所に置いた状態”から持ち上げています。
ボール補足センサ
ダイレクトドライブやギヤ比3:1程度の場合は空転時とボール補足時のモーター電流の違いで検出するセンサレス方式が実用になるでしょう。
ギヤ比が高くモータから見た負荷変動が小さい為にS/Nが悪くて断念し、メカニカル方式にしました。
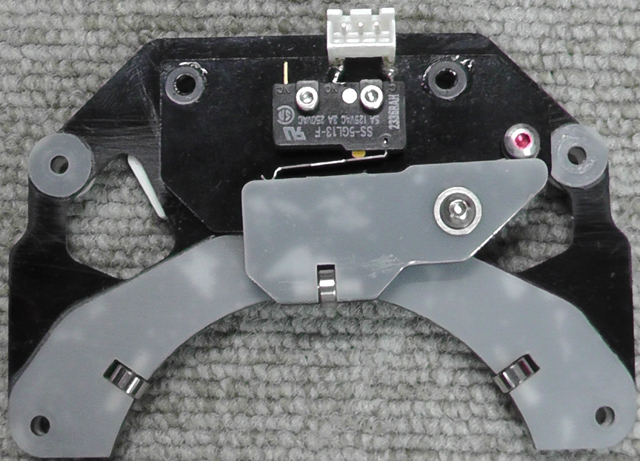
ボールを傷つけない為にベアリングでボール受けてマイクロスイッチに伝えるアームを有しています。
このアームはデリケートなマイクロスイッチのヒンジ・レバーの保護やストローク変換の役目も兼ねています。
下側ローラーの回転検知でもボール補足を確認できました。
光学式を代替する方法は色々あります。
デバッグ用LEDの使用例
実際に使て見るとカメラアングルの都合に合わせて見やすい位置にデバッグ用LEDを設置できるので便利です。
追記:この記事は予め設計に織り込んでおけば遮光は意外と簡単だと言う事と、遮光の具体例を見ていただくのが目的です。
審判の判定、車検の基準について示すものではありません。
具体的指針が示されない、グレーゾーンの状況では”白”に仕上げておく事を推奨します。