信号GNDの処理
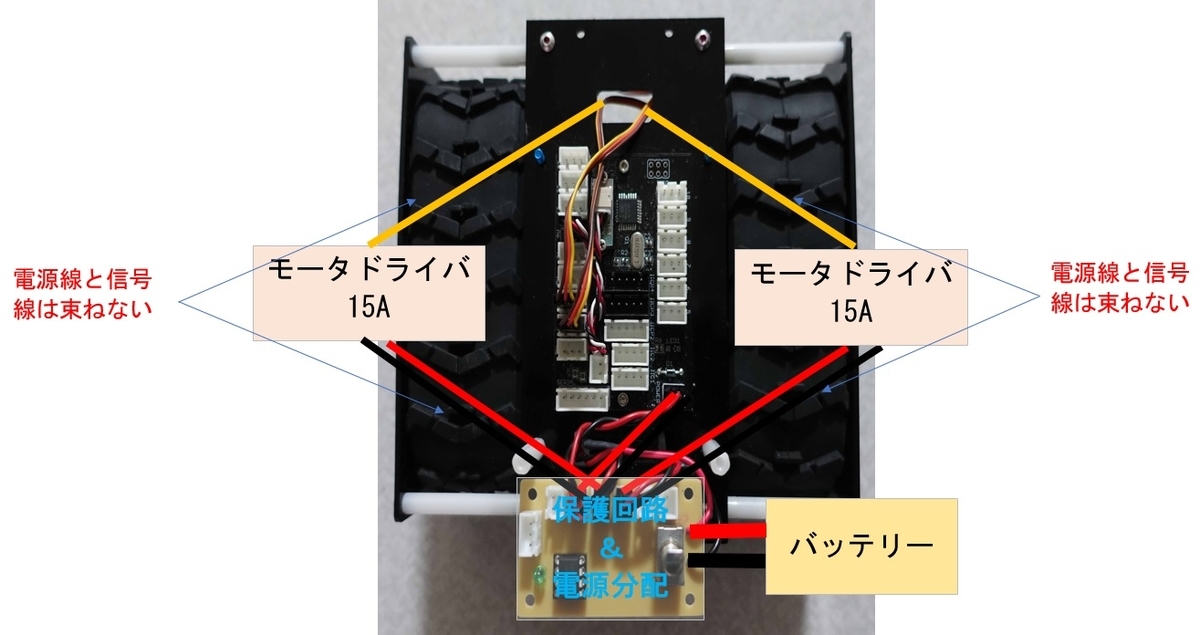
マイコン基板-モータドライバ間の信号線(下図黄色の線)のGNDは?
"銅線は意外と重いのでGNDを省いて、信号線だけで接続!"としたい所ですよね。
サッカーライトウェイトのロボットで何例か見かけたのですが、絶対にしないでください。
この信号GNDを省くと信号線を流れる電流はモータドライバ→保護回路&電源分配→マイコン基板のルートを通る事になります。
つまり前出のノイズまみれのGND線を通過すると同時に、この経路が大きなループを作ります。
皆さんはEMI(周りの機器に悪い影響を与えない為に電磁波を出さないようにする規格)・EMS(外来ノイズの影響を受けにくいようにする規格)をクリアする必要はありませんが、大きなループは電磁波を効率良く飛ばすアンテナの作用と効率よくノイズを拾う作用をする、なかなかの厄介者です。
さて、モータドライバで生まれたノイズ君は、都合よくモータドライバ-保護回路&電源分配に留まってくれるでしょうか?
残念ながらノイズ君は道があれば信号線・電源線の区別なく遠慮なく通ろうとします。
そこで、”ごく少数の物好き”しか通らない様に信号線を”いばらの道”に仕立てます。
ただし、信号君から見ると快適な道に見えなければなりません。
この仕組みがフィルタです。
テーマがI2Cのノイズ対策ですので、”I2Cモータードライバ”を例題にします。
下図はフィルタの挿入位置と電源GND、信号GNDの位置関係を示しています。

フィルタの特性です。

400kbpsの信号をストレスなく通過させて、ノイズを阻止する境目の周波数を約1MHz(信号周波数200kHzの5倍)に設定しています。
66pFの容量負荷が追加になりますので全体で400pFを超えない様に注意が必要です。
ちなみに4.7μHはチップインダクタの最大値です。
後は、プルアップ抵抗(Rp)の選定方法です。