キッカー不要論
キッカーパワーテスターの傾斜20°、0.22m登ったボールの床からの高さは0.075mです。
ボールの重量0.14kgですので、位置エネルギーが計算できます。
この位置エネルギーを運動エネルギーに変えればボールの速度が計算できます。
この計算結果より、キッカーで出せる最大速度は4.4km/hとなります。

ドリブラーを用いたシュート速度が、この4.4km/hを簡単に上回ることができるので、ドリブラー設計・製作が可能ならキッカーを搭載する意味は薄いと言えます。
ドリブラーによるシュートについて - 隠居エンジニアのものづくり (hatenablog.com)
パワーテスト方法が変更
2024Soccer_Rules_JP04.pdfには「ライトウェイトリーグのパワーテストは、相手ゴールでバウンドした後、ボールが相手ゴールのペナルティエリアから出なければ合格とします。」とあります。
これが大幅なパワー上限の緩和なら ”ドリブラーを用いたシュート速度がキッカーを上回る” というキッカー不要論の前提が崩れます。
キッカーパワーテスターによるボールの到達距離
キッカーパワーテスターの上からボールを転がして、ボールの到達距離を測れば、パワーテスト変更後とのパワー差が分かりそうな気がします。
ところが
テスト時は静止したボールを打ち出すので回転してないボールを0.22mのスロープを滑らしながら(スロープとボールの摩擦力に抗しながら)頂点に達します。
打ち出し直後がトップスピードで、傾斜を登る過程で速度0に近づきます。
下りの時は、速度0から転がりながら傾斜を下る過程でボールの速度と回転が加速して行きカーペットに接地した瞬間に速度・回転速度共にトップスピードに達します。
ボールの回転が加わる為に、キーカーパワーテスターから転がしたボールの到達距離では単純に比較できません。
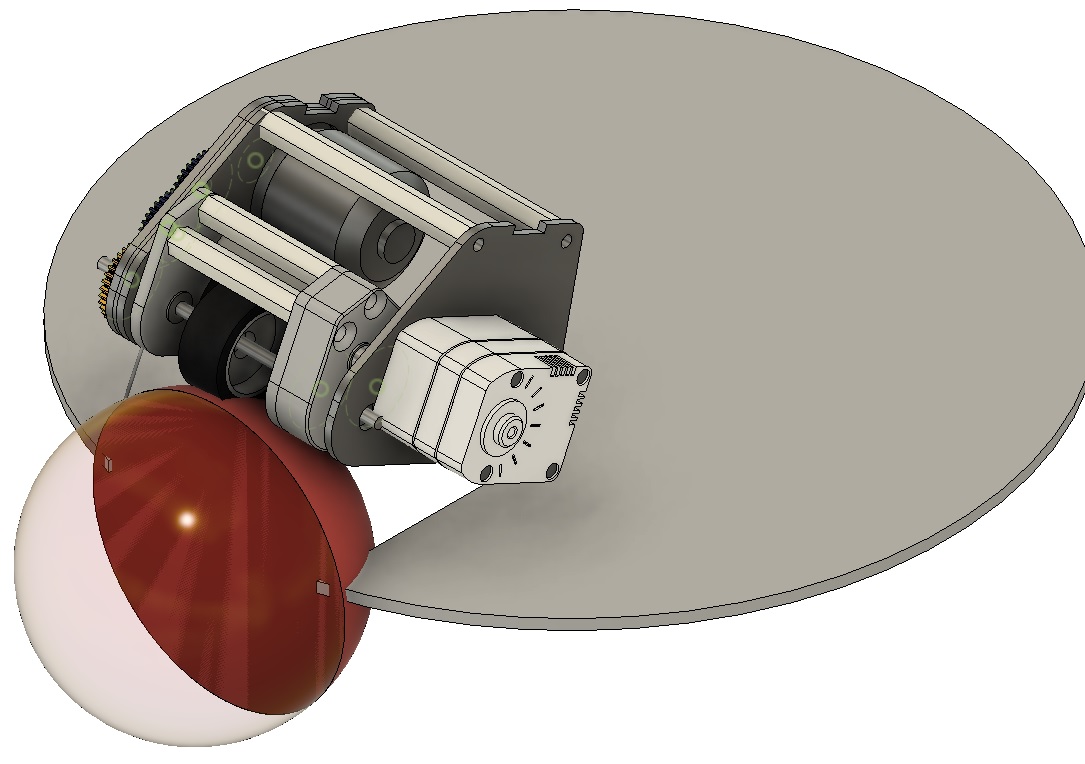
キッカーを設計・製作する
こうなるとキッカーを製作してパワーテスト方法変更後のキッカーの攻撃力を知る方が速そうです。
メカニカルキッカーなら、ばね定数とキッカーのストロークからボールの初速が予め計算できるので、設計は1日あれば可能です。
レーザー加工機での部品の切り出しを前提に設計すれば、カット30分、接着・タップなどの追加工を含めても半日で組み上がります。
近藤科学さんのシリアルサーボを用いてエンコーダーの情報によるサーボホーンのポジション制御を行う事で、リミットスイッチによるメカニカルな位置検出を省略してシンプルな機構に仕上げます。
KRS-330x系のサーボモーターにクランクを付けてピストンがボールの中央の高さになるように設計した結果として、ストローク15mmが決まりました。
次にモノタロウで購入可能な規格スプリングの中からキッカーパワーテスターの計算値4.4km/hの2倍以上のボールの速度を目指して、ばね選定を行います。

キッカーばね選定
ピストン速度は空打ちの場合です。
相手ゴールにボールが到達するのと同じタイミングで "次のシュートを打つ準備" が出来ています。
キッカーパワーテスト
・196gのキッカーユニット単体でパワーテストを行ったので御覧の様にユニットのブレによるロスが発生している可能性があります。
・ゴールを固定していないのでゴールが下がった事で跳ね返りの距離が短くなった可能性があります。
現状でセンターサークルまで戻ってくるので、1400gの機体に搭載して、ゴールをねじ止めしてあるコートの場合に、かなりオーバーパワーである可能性があります。
2024年モデルはキッカーを軸に設計しようと思っていたのですが、ちょっと迷う結果となってしまいました。