とあるサマーキャンプにてプレゼンテーションの時間が伸びて私のプレゼンは中止、質問を一つだけ受け付けて終了にしますとなった。
メンターさんからの”ロボカップジュニアで世界に行ける子供を育てる指導法は?”の質問に対して”手伝わない事です”と回答し、続く詳細な説明をする間もなく終了となりました。
時間がないので仕方がなかったのですが、全く意図が伝わらなかっただろうなと思っています。
何年も経ってますが続きを述べます。
小学校低学年でロボットを始めた子供にとって、TJ3の組立は難しいようです。(今はαエクスプローラーがあるので簡単に組立できますが・・・)
観察していると、ラジオペンチでナットを掴みながらM3のビスを複数の部品を通した状態で締め付ける所が壁になっています。
”そこだけしてあげよう!”、”ナットだけ掴むからビスをしめて!”などの助け舟は指導の範疇かもしれません。
しかしここでは、大人が手伝ったロボットはルール違反になって大会に出れなくなる旨を説明し、組立し易くする方法・工夫を約束して一旦組立を諦めてもらいます。
”できない”原因を詳細に分析すると
①ドライバーとプラスビスを同軸に保つ事ができずにズレてしまう
②小さな手に対してラジオペンチが大きい為にナットを掴む事だけて手一杯
手先の器用さが大人と比べて不足している部分はあるとは思いますが、手の大きさに対して工具のサイズが合っていない事が大きな負担になっています。
これを踏まえて対策を打ちます。
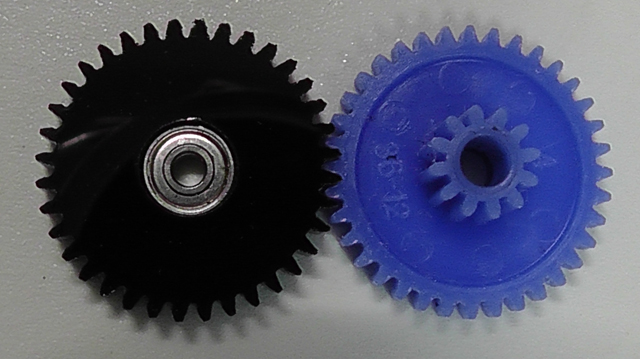
①プラスビスをヘックスビスに変更することで保持を容易にする
②小さい手に馴染む短いBOXドライバを用意する

対策が功を奏して、組立は順調に進みます。
一切の手助けを受けずに組み立てが、できた事は大変嬉しい様ですし、自信につながっている様子です。
また作り上げたロボットは、とっても大事にします。
この後、プログラムに移行した時にも”何とか動かしたい”と言うモチベーションに繋がって行きます。
ロボット本体を大人が一切触らない事を大前提の上で、”ものづくり”や”プログラミング”に必要なセオリーや数学・物理は積極的に教える方が良いと思います。
その際には小学校低学年にも抵抗(お勉強っぽく無い)なく楽しく理解してもらえる”工夫”が必要です。
中学校で習う2進数を例にしましょう。
算数の3桁・4桁の計算ができない子に”円をつけて考えて!”と言うと一瞬で解けると言う笑い話があります。
"1000-350=?"でも"1000円で350円の物を買ったらお釣りはいくら"は暗算で解ける訳です。
実際には存在しない”8円玉”、”4円玉”、”2円玉”と”1円玉”の”おもちゃのお金”を作って買い物ごっごをします。

私がお店のオジサンをして”13円になります”と言うと、子供が8円玉と4円玉と1円玉を支払う感じで遊んで、戸惑いなく支払える様になったら(3,4回で覚えます)1円から15円を支払うのに必要な数を1か0で記入する表を渡します。
先ず一発で100点満点です。

これは2進数と言って中学校で習うんだよ(絶対先に行ってはダメですよ)と言うとビックリすると同時に自慢げだったりします。
2進数の概念がわかっているとレスキューラインで4個のセンサを使うプログラムが容易に理解できます。
新しい知識がロボットを強くすると感じたり、仕組みを知れば思い通りにロボットを動かせると言う体験をした子供たちは”学校のお勉強”はともかく”ロボットに関する知識”には貪欲になります。
要するに手伝わないで、子供自身の手で”てきる”環境を整えてあげる事が大切です。
余談ですがヘックスビスの件は2008年にあった実話ですが、初心者ではなくメンテ性が良いとの認識でヘックスビスは上級者に流行っていきました。