遮光は簡単です
方法は光路を塞ぐか、相手ロボットが見えない様に光路を制限するかの何れかです。
シンプルでとても簡単な事です。
3DCADで設計したり基板作成している人には造作もない事ですので、汎用部品を用いてロボットを作っている方向けに解説致します。
基板のLEDは黒色テープを貼れば遮光できます。
ビニールテープの様に貼る時のテンションで伸びて、貼った後しばらくして見ると縮んでいると言う事が無く、剥がした後の糊残りも少ないです。
手で綺麗に(繊維方向に)切れるので、作業性も良いです。
マイコンボードやセンサなどの基板のLEDは殆ど表面実装なので貼るのは簡単です。
無駄に明るいやつは2重、3重に貼ればOKです。
手持ちの基板で3重貼りを超えた物はありませんでした。
砲弾型は巻き付ければOKです。
ロボットから見えなくて人から見えるLED表示
筒状にして220mmの位置から見えない様にすれば相手ロボットからみえません。
それより高い位置からは覗けるので人はLEDを確認できます。
デバッグ用LEDユニット
赤丸が実際に2019モデルで使用していたデバッグ用LEDユニットです。
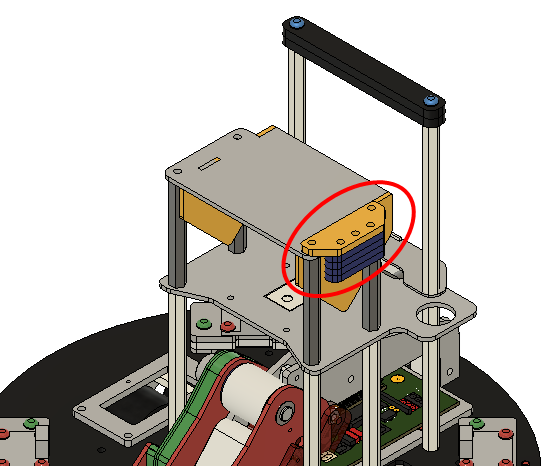

電圧計
0.5mm塩ビ板を "コの字" に曲げて黒色テープで電圧計に巻き付けます。
"コの字" にした理由は2つあります。
〇平板に印を付けて(電圧計の幅)ラジオペンチで曲げる作業は"コの字"までは簡単!
〇黒テープで巻く時に空いている面はテープの粘着部になるので視野制限板の固定を兼ねる事ができる


少し台形になっていますが実用上問題ありません。
視野制限板自体の高さはアセテートテープに合わせて19mmです。
もちろん黒色の粘着テープならなんでもOKです。
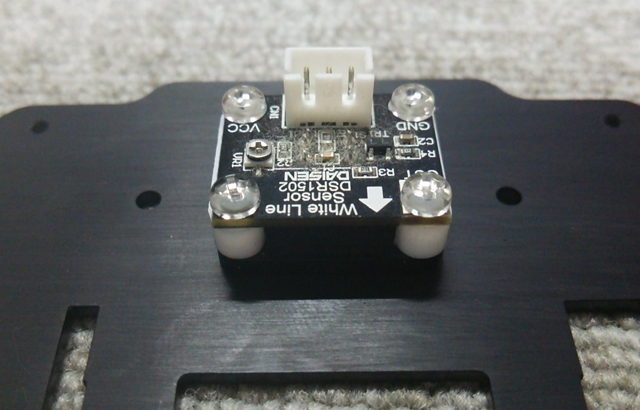
ラインセンサ
ダイセン電子工業さんのホワイトラインセンサを例にします。
ホワイトラインセンサー | ロボット,センサー | 株式会社ダイセン電子工業 (daisen-netstore.com)
このセンサは可視光フォトトランジスタに白色LEDの直接光が当たらないようにスポンジで遮光されています。
このスポンジの厚みが6mm程です。
センサ感度には距離特性があり、感度が良い ”おいしい距離” があります。
3mmアクリル板をレーザー加工する前提の設計ですが、下図の青色部分は5mmか6mmのスペーサでOKです。



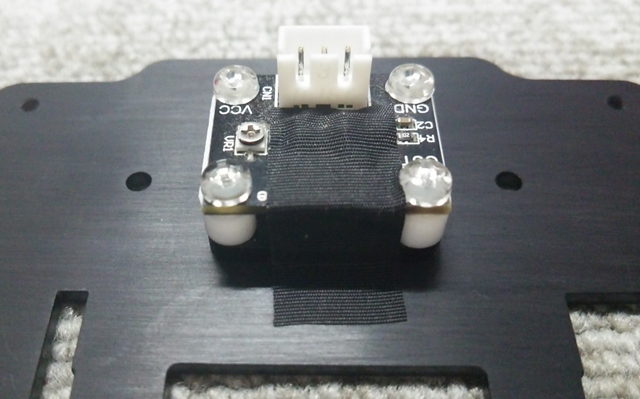
SEM3やFR4を用いたセンサはLEDの光がガラスや樹脂を伝わって裏面や側面に漏れますので黒色テープで対策します。

写真は底側から斜めに見ています。
LEDとフォトトランジスタが隠れている様子が分かると思います。
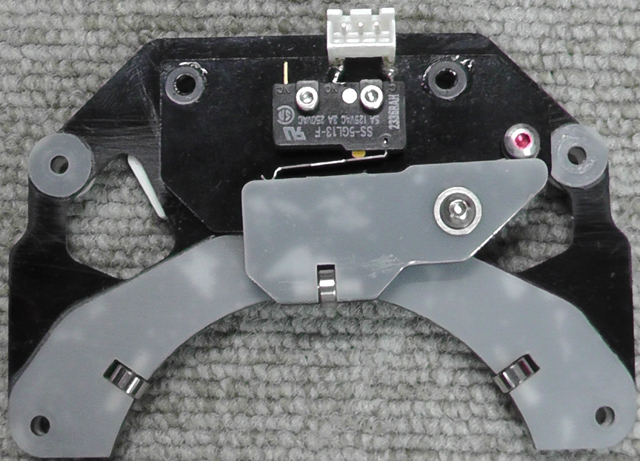
ボール補足センサ
マイクロスイッチ式は機構センスと機構部品取り扱いのノウハウが少し必要ですので、解説したいと思います。
ヒンジ・レバー型を使用しますが、動作に必要な力25g、もどりの力は2gと大変小さな力を扱う機構となっています。
ロボットが140gのパルスボールに勢いよくぶつかる部分に使えば、"あっという間" に壊れます。
一旦頑丈な可動部品でボールを受ける構造に設計する必要があります。

もどりの力2gを取り扱うにはボールベアリングの使用は必須です。
また、ベアリング使い方にも繊細さが必要になります。

この内輪が外輪固定部と触れると意味が無くなるのですが、M3ネジで止められるサイズになると容易に摩擦が発生します。
また下図の様にネジ止めの締め付け圧が内輪と外輪に圧力を発生させる様な構造では2gでは動きません。

M3のネジ頭の内側もM3ワッシャも、ベアリングの精度に見合う平面ではなく、丸みがありますので外輪に触れてしまいます。
ネジを締めこんで行って徐々にベアリングの動きが悪くなる場合は、これが原因だと思って良いでしょう。
これを改善する為にベアリングの精度に見合うスペーサを挟みます。
お手頃価格で入手性の良いタミヤHOP-UP OPTIONS φ5.5mm アルミスペーサーセットを愛用しています。
0.5、1.0、1.5、2.0、2.5、3.0mm厚が各4個入ってます。
下図の様な構成にすれば、締めこんでも滑らかに動きます。

愛用のベアリングは NSK ステンレスミニアチュアベアリングZZ フランジタイプ SMF63ZZ です。
出典:極超小型基本スイッチ形D2FSデータシート
Koyo ベアリングコラム