講習会が小学生対象の場合でも回路図の読み方について講義しています。
講習会では、並列・直列共振回路の周波数特性を描く所まで進めるのですが、表情を観察しながらの対面の様には行かないので、アレルギーにならない様に冒頭部分のみ紹介します。
小学生高学年になると電池と豆電球を繋いでみたり、電磁石を作ってみたりします。
つまり、電源・スイッチ・負荷については習っていることになります。
ロボットに興味を持っている子供たちは乾電池にモーターの配線を押し付けて回して見るぐらいの体験はしているようです。
後はコンデンサの動作が理解できれば実体験の感覚で回路を読むことができます。
この絵の様に、大きな容器に入っている水を小さな容器にホースで繋いでいます。
小さな容器は殆ど空っぽです。
この後どうなりますか?

小さな容器に水が移動して水の高さが大きな容器と同じ高さになりますね。

ではもう少し細かく見てみましょう。
小さな容器は殆ど空っぽの時は勢いよく水が流れますが、だんだん流れが弱くなって水の高さが同じに近づくと殆ど流れなくなって、水の高さが同じになると水の流れは止まります。
では再び水の流れを作るにはどうしたら良いですか?
答えは小さな容器を上げるか下げるか、大きな容器を上げるか下げるかですが、図では小さな容器を上げています。

今度は、反対向きに水が流れて小さい容器と大きい容器の水の高さが同じになると水が流れなくなります。
今度はホースがとても太かったらどうなるでしょうか。
小さな容器に向かって水が流れて、水の高さが同じになると水の流れは止まると言う一連の動きは変わりませんが、同じ高さになるまでの時間が早くなります。

逆に注射器の針のような、とても細い管で繋いだらどうなるでしょうか、水の高さが同じになるのに何分もかかるかもしれません。
この様に管が太いと水が良く流れて、細いと少ししか流れなくなる性質があります。
これを配管抵抗と言います。
電気でも太い配線はたくさんの電気が流れて、細いと少ししか流れなくなります。
電気では”抵抗”と言います。
注射器の針の様に極端に流れにくくする目的のものを抵抗器と言います。
さっきの絵の大きな容器が電池、小さな容器がコンデンサと考えて下さい。
”水”を”電”に変えるとこんな絵になります。
絵は水と電気がおなじであることをイメージしやすい様に”水位”を”電位”に言葉合わせしてますが、電位=電圧と考えて下さい。
皆さんの普段使いに合わせて以下”電圧”を用いて説明します。

水を電気に置き換えても全く同じで、空っぽのコンデンサ(小さい容器)に電池を繋ぐと電池と同じ電圧になるまで電気が流れます。
同じ電圧になったら電気は流れません。
電池の電圧が下がったら、コンデンサも同じ電圧になるように、また電気を移動させます。
コンデンサは抵抗がない単体の性質として
①電圧が一定(直流)だと電流が流れない
②電圧が変動(交流)すると電流がながれる
性質があります。
コンデンサに電流を制限する抵抗がある場合は
③抵抗が電流を制限するので速い電圧の上下には追い付けません。
これらを踏まえて、ダイセン電子工業さんがマニュアルで回路図を公開しているラインセンサを読んでみましょう!
ラインセンサー | ロボット,センサー | 株式会社ダイセン電子工業 (daisen-netstore.com)
回路図はこんな感じになります。
一番右の茶色の三角と横棒で書かれた電子部品はLEDと言って光を出します。

”信号”はセンサの状態によって電圧が変わります。
例えばラインセンサの場合、白線は4V、黒線は0Vと言った具合です。
コンデンサは②の性質で電圧に変化があった瞬間には電流が流れますが、信号の4Vや0Vが安定している場合には影響を与えません。
白線(4V)の時、または黒線(0V)の時、何れか安定している時の回路動作を考える時には”縦に付いているコンデンサ”を省略します。

回路は接続点を変えなければ、形を変えてもOKなので読みやすいように整えます。

トランジスタと言う3本足の電子部品はスイッチに置き換えます。
トランジスタに似た形の右側にある一本足りない電子部品”PI1”はフォトトランジスタと言って、光が強いとスイッチON、光が弱いとスイッチOFFすると考えて下さい。
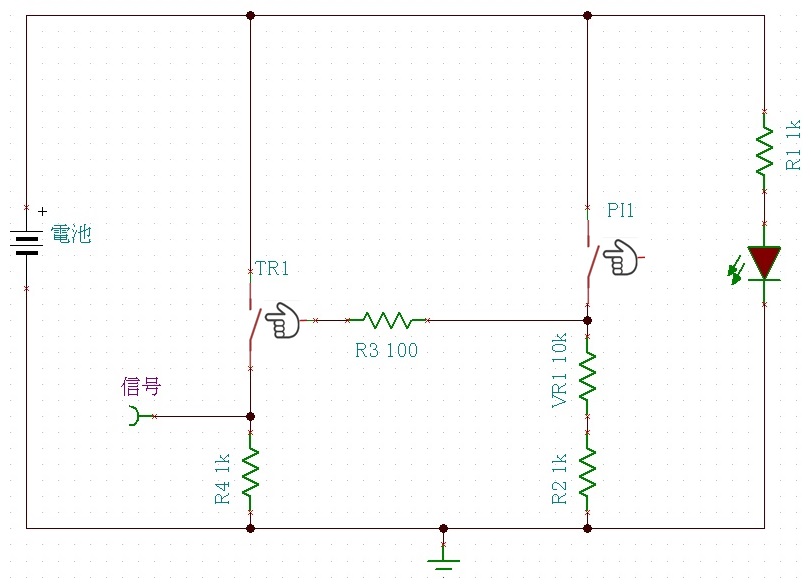
回路読みの準備が整いました。
先ず光が強い時”PI1”がスイッチONになります。
すると電池の+と繋がるので、R3に電流が流れて”TR1”がスイッチONになります。
これも電池の+に繋がるので”信号”は電池電圧になります。
光が弱い時”PI1”がスイッチOFFになります。
R3に電流が流れないので”TR1”はスイッチOFFになり、”信号”は0Vになります。
ではこのONとOFFの間はどうなるのでしょうか?
この様に可変抵抗に置き換えてイメージします。

強いでも弱いでもない光(灰色やセンサの視野が白黒半々で捉えている時など)”PI1”が”TR1”に電池電圧の半分程度の電圧を加えます。
”TR1”も信号線に電池電圧の半分程度の電圧を加えます。
光の強さによって0V付近~電池電圧付近までの電圧が変わる動作であることが分かります。
という具合に回路の動作を理解できればファーストステップとしては充分です。
まとめ
①縦に付いているコンデンサは一旦省略して回路の要素を減らしてスッキリ見せる。
②接続点を変えないなら変形OK!水と容器のイメージに合うように縦並びに変形がお勧め
③トランジスタはスイッチON、スイッチOFFに置き換えて考える。ON-OFF間の状態は可変抵抗に置き換えて考える。
④トランジスタの状態はセンサ側から判断して信号出力側に進めて行く。
次回はいよいよ1ポートにラインセンサを複数個繋げる場合と方法についてです。