危険性のあるミスリードについて
”物理はみなさんが体験して感覚的に良く知っている事を数式で表しただけの学問です。国語や算数と違って学校に行く前の子供さんでも感覚的に理解している当たり前の事にすぎません。”(異論はあると思いますが・・・)
物理アレルギーはもったいないですよ!
と言うことで今回の主役はジャイロ効果です。
みなさん、一度は”コマ”を回したことがあると思います。
コマは立てても転びますが、回転を与えると転ばずに立ちます。
回転が弱くなると不安定になって最後は転びます。
コマで遊べば”当たり前に知っている物理現象”です。
この回転体が回転軸を維持し続けようとする振る舞いをジャイロ効果と言います。
ドリブラーで回転させているボールにもジャイロ効果が発生しています。
ジャイロ効果
この図は左右2個のロータを持つドリブラー機構についてロボットの旋回時に起こるジャイロ効果の作用についての説明です。
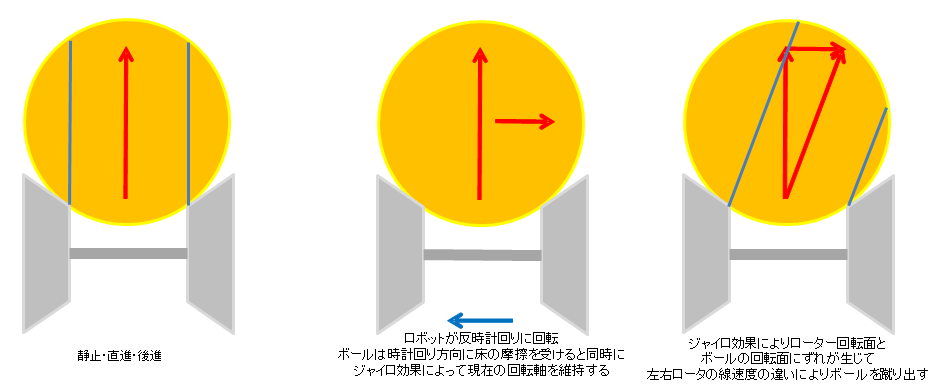
回転数を上げれば、ジャイロ効果も大きくなって蹴り出しも強くなるので、とても非効率なのが分かります。
ところが、回転数をあげると蹴り出した時に(ロータからボールが離れた時)バックスピンでボールがロボット側に戻る力が大きくなるので、回転数を上げるとボールの保持力自体は上がります。
しかしながらこの場合は非効率ゆえに、ロータに触れると火傷をしたり、巻き込まれると怪我をする程の回転が必要になります。
結果として”ドリブラーには強力なモータが必要”となってしまいます。
これが危険性があるミスリードです。
次の図は、ボールとロータの接点が一つになるシングルロータの説明です。
この場合は前述の問題は発生しません。

論より証拠でシングルロータの”OYA-G 2018モデル”で遠心力シュート(マカオシュートと呼ばれるやつです)動作をさせた動画を御覧下さい。

ボールがロータを蹴り出さないのでボールが離れません。
ドリブラーモータのボール保持時の電流も1A以下で約7Wと省電力です。
球体の幾何学的性質
ロータをスプリング等でボールに押し当てる機構にした時、ロータ位置を何処に設定するか問題ですが、図にするとイメージし易いと思います。

一番左の位置はルール違反でNGですが、位置と力の加わり方を説明するのに分りやすいので描きました。
ボールと床との摩擦力があるからバックスピンによってボールがロボットに張り付く状態が作れます。
この摩擦力はボールの重量×摩擦係数で得られますが、左の図の様にロータで押し付けることで(ボールの重量+ロータの押し付け力)×摩擦係数となりボールの保持力を大きくすることができます。
右の様に配置すると、押し付ける力を失う上に外に押し出す力になってしまします。
このボールの実質摩擦力と押し出し力はボールとロータの接触する接線がなす角度で決まります。
三角関数を習っている方は接線角度の定義を左の図を"0°"、右の図を"90°"とすると中程の図の力を計算することができます。
ボールの実質摩擦力:(ボールの重量+ (ローターの押し付け力・COS(Θ)))×摩擦係数
押し出し力:ローターの押し付け力・SIN(Θ)
つまりロータの設置位置下限は
(ボールの重量+ (ローターの押し付け力・COS(Θ)))×摩擦係数 > ローターの押し付け力・SIN(Θ)
となります。
三角関数がまだの方は図の緑の垂直の線が水平の線より大きくなる所と考えて頂ければOKです。
あくまでロータをロックしてボールとロータは滑らないと定義した時にドリブラ機構のスプリングテンションによってボールを押し出してしまわないポジションを計算しているのと等価ですのでボールが回転してロボット側に移動する力が加わる場合とは異なるのですが、充分に安全な設計値としては良い指標だと思います。
ちなにみオープンのオレンジボールは摩擦力が大きいので多少設計が甘くてもドリブラーが成立しますが、ライトのパルスボールは摩擦力が小さいのでドリブラーの設計はとてもシビアになります。

この様にオレンジボールでは成立するポジションでもパルスボールでは成立しません。
摩擦係数の違いは設計難易度の決定的違いになります。
これが初心者講習をオープンで行う理由の一つでもあります。
もちろん前出の条件に基づいたポジションに設定できれば次の動画の様にパルスボール用のドリブラーは成立します。

動画はOYA-G2021モデルです。
オレンジボール用とパルスボール用の2ポジションを切り替えれる設計にすることでオープンにもライトウエイトにも競技参加できるように設計しています。
もちろん重量は車載カメラ搭載時でも1049g、駆動用モータ2個、7.2V Ni-MHバッテリーで日本リーグの車検に合格できる仕様になっています。
(エンジニアが競技参加するにあたっての自主ハンデです。日本リーグに出るつもりはありません念のため)
回転体の物理現象や球体の幾何学的性質を利用して効率の良い機構を考えれば、安全で相手ロボットとのボールの取り合いに負けない強力なドリブラーを作る事ができます。
この辺りの最適解を示す目的でOYA-G 2021モデルは設計しています。
コンセプトは”ロータに安心してさわれる(触れても火傷や怪我をしない)”ドリブラー機構です。
ロータ回転数が低くても保持力が上がる機構に仕上がっています。
みなさんのドリブラー機構は "ダイレクトドライブ~ギヤ比5:1" になっていると推測しているので ”嘘だぁ~” と聞こえてきそうですが、使用ギヤードモータのギヤ比は200:1です。(ロボットキットでお馴染みのプラスチックギアTTモータ換装品)
こちらもドリブラーモータのボール保持時の電流は1A以下で約7Wと省電力です。
そもそも自分が触れるのが怖い程のローターがブンブン回っているロボットを審判に委ねる状況は改善したいと思っています。
ルールより前に(ルール上違反でなくても)ロボット設計は人や公共物を傷つけないが原則です。
相手ロボットと押し合いになってボールの回転が止まることは良く起こりますので、保持中のボールの回転を止めた時にローターがボールを削ることが無いかは、最低限確認してください!既に試合球が凸凹になる案件が発生しています。
キッカー制限はソレノイドやエアシリンダでボールを破壊するロボットが多発した結果、設けられた規定です。
ボールを削るロボットが多発して、ドリブラー規定なんかが策定されない様に安全なドリブラー設計を心掛けましょう!